Mandibula este osul nepereche care constituie maxilarul inferior al craniului si se compune dintr-un corp si doua ramuri, ce formeaza cu corpul un unghi de circa 120˚. In timpul functionarii sale, mandibula poate lua 4 pozitii de baza: relatia de postura, relatia centrica, relatia de intercuspidare maxima si relatia de ocluzie centrica.
Mandibula functioneaza ca o parte a unui sistem cu reglare automata. Miscarile ei nu sunt haotice, ci sunt coordonate de catre sistemul nervos central, care analizeaza atat pozitiile succesive al mandibulei, cat si solicitarile mecanice care apar in fiecare moment. In functie de acestea, sistemul nervos ia decizii, pe care le transmite muschilor, acestia executand comenzile. Centrii coordonatori din creier sunt informati asupra pozitiei mandibulei de catre senzorii locali, a caror pondere covarsitoare este legata de suprafetele dintilor. Excluzand exceptiile (sugar, batran, persoane edentate in general), se creeaza in timpul vietii niste tipare ale miscarilor mandibulei care sunt memorate, chiar si in functie de tipul de aliment mestecat. Astfel datorita memorarii acestor automatisme, rolul creierului devine foarte redus in luarea deciziilor, procesul de masticatie desfasurandu‑se aproape reflex, automat, cu miscari precise si identice, perfect reproductibile. Daca apare un obstacol ca factor de perturbatie in procesul masticator, acesta duce la intreruperea instantanee a schemei de reflexe si intra imediat in actiune cortexul, pentru a lua o decizie adecvata si a da o noua comanda motoare.
In actionarea mandibulei sunt implicate mai multe grupe de muschi; astfel, la miscarea de ridicare a mandibulei (inchiderea gurii), rolul esential il are muschiul maseter, ajutat de muschii temporali si pterigoidieni. Muschi antagonisti sunt fasciculul posterior al temporalului, care fixeaza articulatia temporo‑mandibulara, iar franarea miscarii se realizeaza prin muschiul milohiodian si digastric. Acesti muschi actioneaza intr‑o armonie si precizie extrema, coordonati cerebral, respectiv condusi de reflexele memorate.
Miscarile mandibulei sunt extrem de variate, datorita complexitatii maxime a articulatiei temporo-mandibulare. De aceea, s-au facut diverse clasificari ale acestor miscari, dupa diferite criterii. Astfel, se remarca:
miscari simetrice pure fara contact interdentar (simple coborari si ridicari ale mandibulei), numite si miscari fundamentale;
miscari cu contact interdentar cu alimente;
miscari cu contact interdentar fara alimente.
miscari de ridicare si coborare a mandibulei;
miscari laterale;
miscari de propulsie si de retropulsie.
Si acestea pot fi evident cu sau fara contact dentar, sau cu contact dentar (cu sau fara alimente).
Oricat de complicata ar fi miscarea mandibulei, ea poate fi considerata ca o suprapunere de rotatii si translatii dintre care esentiale sunt:
Rotatia in jurul articulatiilor temporo-mandibulare. Aceasta (numita in literatura medicala si miscare de balama) se realizeaza in jurul unei axe imaginare numita ax bicondilian, care trece prin cei doi condili ai mandibulei. Se apreciaza ca rotatia se produce in mod ideal pe o deschidere unghiulara de maximum 12s si prezinta toate proprietatile distributiei de viteze si acceleratii pentru miscarea de rotatie cu axa fixa. In aceasta plaja, viteza unghiulara ω se apreciaza a fi constanta. Miscarea de rotatie a mandibulei se produce natural si este usor de pus in evidenta, pacientul putand sa o execute cu usurinta la cererea medicului, afirmatie care nu se poate face si in cazul miscarii de translatie.
Translatia se refera la propulsie si retropulsie, deci la deplasarea mandibulei inainte si inapoi, in orizontal. Nu este simplu de realizat o translatie perfecta, in care sa nu apara si o componenta de rotatie sau o abatere de la eitatea miscarii.
Propulsia maxima este de 2 ‑ 2,5 cm. Este precedata de o usoara coborare a mandibulei (ura 1).
In orizontal, mandibula executa miscari laterale (lateropulsie sau miscari de diductie). Locul geometric al tuturor pozitiilor posibile ale punctului interincisiv mandibular este aproximativ un romb. Acesta este chiar si traseul parcurs de acest punct al mandibulei daca se porneste din pozitia de intercuspidare maxima, se retrage mandibula in pozitia de protruzie totala si se fac apoi miscari dreapta stanga intre aceste extreme. Viteza de deplasare a mandibulei este mai mare la coborarea ei decat la ridicare, avand valori medii cuprinse in intervalul 0,064 0,135 m/s. Edentatia, respectiv protezarea nu modifica semnificativ aceste valori.
Statica mandibulei
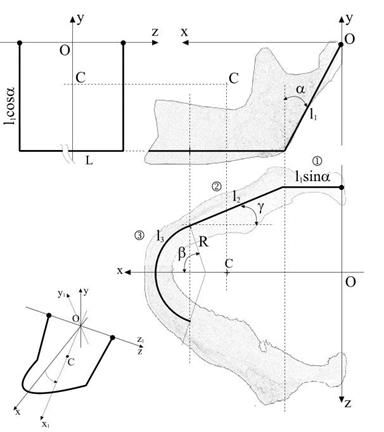
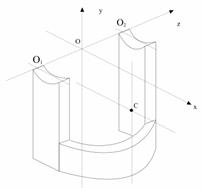
Pentru abordarile statice, mandibula se poate modela simplificat ca o bara curba (ura 2) pentru care se pot calcula simplu, prin programe realizate in MathCAD, elementele ce caracterizeaza distributia de mase. Pentru calculul momentelor de inertie centrifugale si axiale ale modelului din ura 2 s-a folosit o metoda mai putin uzuala, utilizand MathCAD si elemente finite. Modelul de calcul al mandibulei, reprezentat ca bara poate fi creat cu orice program de grafica, dar si cu programe de elemente finite.
S-a ales aceasta din urma modalitate, intrucat din punct de vedere grafic nu sunt deosebiri majore fata de prima metoda, in schimb apare marele avantaj ca modelul poate fi discretizat, adica divizat in subunitati infinitezimale, ale caror coordonate se cunosc cu precizie.
Asupra mandibulei actioneaza forte active, care sunt generate de anumiti muschi si realizeaza miscarea sa, precum si forte pasive (forte rezistente, reactiuni), care sunt date de greutatea proprie a mandibulei si de muschii antagonisti. Fortele active care realizeaza ridicarea mandibulei si inchiderea gurii sunt generate de catre muschii ridicatori (masticatori) asupra carora se pot face anumite precizari :
Muschii temporali, trag mandibula in sus si inapoi (ridicare si retropulsie) sub un unghi de 60 fata de ul orizontal Frankfurt, reusind sa dezvolte maximum 700 N. In realitate, forta este mult mai mica decat valoarea maxima teoretica. Caracteristica dominanta a temporalilor este viteza de reactie. Daca o forta mare este dezvoltata intr-un timp foarte scurt, fenomenul este considerat ciocnire; percutia produsa in cadrul interventiei acestui muschi este egala cu diferenta impulsurilor si astfel, masa muschiului fiind constanta, rezultatul actiunii sale este o variatie mare a vitezei de miscare;
Muschii pterigoidieni interni, actioneaza pe directia de 110 fata de ul Frankfurt, dezvoltand forte limitate superior la 400 N;
Muschii maseteri, inclinati la 97 fata de ul Frankfurt, cu forte de valori limitate superior la 800 N. Muschii maseteri dezvolta cele mai mari valori ale fortei, fiind cei mai importanti muschi masticatori.
|
|
|
Modelarea mandibulei ca bara curba |
Marimea fortelor ocluzale poate fi calculata cu ajutorul legii lui Weber care afirma ca forta dezvoltata de un muschi este proportionala cu suprafata sectiunii sale transversale. Fiecare cm2 de sectiune transversala a muschiului uman poate dezvolta forte de maximum 100 N. Valorile fortelor aferente celor 3 tipuri de muschi, care au fost enuntate mai sus, verifica foarte bine aceasta lege. In procesul masticatiei, fortele au valori normale de 300-800 N, iar valorile maxime sunt de circa 3900 N la molari si 1500 N la incisivi.
In mod uzual, din punct de vedere static, mandibula se comporta ca o parghie de gradul 3, deci grupul muscular care genereaza miscarile trebuie sa depuna un efort mai mare decat rezistenta bolului alimentar.
3. Dinamica mandibulei
In modul cel mai simplu, mandibula poate fi studiata ca un rigid cu axa fixa, neglijandu-se celelalte miscari ale sale, ce apar in realitate datorita conuratiei articulatiilor. Sistemul de ecuatii diferentiale se poate rezolva pentru cazul mandibulei umane, (intr-una dintre variantele posibile) facand aproximarile de forma din ura 2, iar rezolvarea sistemului s-a efectuat cu ajutorul unui program de calcul realizat in MathCAD, impunand o lege de miscare θ=θ(t).
Un alt model simplificat de calcul din literatura pe care s-au facut studii si cu metoda elementelor finite, este cel reprezentat in ura 3. S-a presupus o sectiune omogena si de grosime constanta, de 10 mm. Data fiind simplitatea sa, se considera ca un astfel de model ar fi potrivit pentru analiza cu metodele clasice ale mecanicii, precum cel din ura 3, nicidecum cu metoda elementelor finite, care are abilitatea de a lucra cu modele complexe.
Model simplificat de mandibula
4. Studiul starilor de tensiune din mandibula prin aplicarea metodei elementelor finite
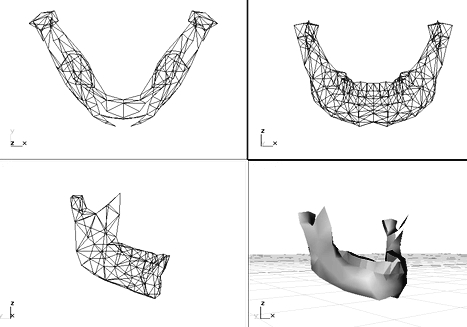
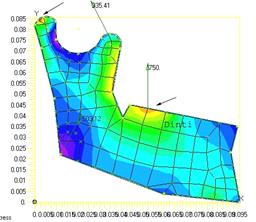
Urmand regulile de baza ale modelarii, simularii si proiectarii asistate de calculator, s-a realizat un model tridimensional al mandibulei dentate, in vederea studierea si analizarea solicitarilor mecanice, care este prezentat in ura 4.
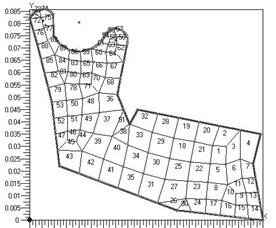
Structura discretizata a mandibulei, vazuta in ul sagital, este cea din ura 5 numarul elementelor finite create prin discretizarea structurii de analizat, alegandu-se in functie de dimensiunile obiectului de studiu.
S-a considerat ca osul mandibular are o structura omogena, pentru care sunt valabile urmatoarele caracteristici fizice:
modulul lui Young: 1,5.1010 N/m2
coeficientul lui Poisson: 0,3
densitatea materialului osos: 1300 kg/m3.
Maseterul este cel mai puternic muschi care actioneaza asupra mandibulei, in sensul ca dezvolta cea mai mare forta si produce cel mai marelucru mecanic si singur si impreuna cu pterigoidul. De aceea, intr-un prim caz studiat, s-a considerat ca asupra mandibulei actioneaza doar acesti doi muschi, ignorand temporalul care dezvolta o forta mai mica.
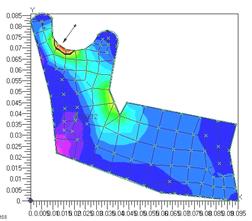
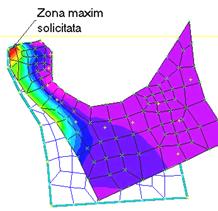
S-au luat in calcul valorile normale dezvoltate in procesul de masticatie si nu cele extreme, fiindca harta repartizarii solicitarilor asupra osului mandibular este aceeasi (ura 6). S-a marcat cu sageata zona de solicitare maxima, care se afla pe saua dintre condilul mandibular si procesul coronoid, (explicabil prin faptul ca sectiunea osului este foarte redusa in acea zona, chiar minima pe ansamblul mandibulei). O a doua zona critica, cu valori foarte apropiate de prima, este si cea din unghiul intern al mandibulei, imediat dupa ultimul molar, (elementele 31 si 32), lucru firesc avand in vedere forma specifica a unui concentrator de tensiuni pe care o prezinta aceasta zona.
Se observa ca sub actiunea maseterului (conjugat cu pterigoidul), al carui punct (in realitate arie) de insertie este pe cotul mandibulei si actioneaza prin tragere in sus sub un unghi de 60-70˚, cu o forta cumulata medie de 500 N, se produc tensiuni maxime in punctele indicate prin sageti. Aceste zone corespund pe mandibula reala tocmai zonelor cu grosime minima a peretelui osos.
|
|
|
Model 3D al mandibulei dentate, creat in vederea analizei cu metoda elementelor finite |
|
|
|
|
Structura discretizata a mandibulei, vazuta in ul sagital |
Distributia eforturilor in mandibula sub actiunea maseterului si pterigoidului |
|
|
|
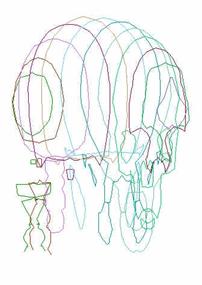
In vederea simularilor si analizei mecanice si matematice in vederea imtarii, s-a realizat un model tridimensional al craniului uman, prin aproximare cu elemente e, in ideea folosirii acestuia atat pentru analiza mecanica prin metoda elementelor finite, cat si pentru analiza geometriei scheletului capului cu metode proprii imagisticii.
|
|
|
|
Model cranian computerizat |
Varianta renderizata a imaginii din ura 9 |
Modelul realizat este prezentat in ura 9 si este constituit din elemente triunghiulare. Zona mandibulei a fost construita cu elemente mai mici, in scopul obtinerii ulterioare a unei precizii de calcul sporite. Restul scheletului capului nu are componente in miscare si de aceea creeaza mai putine probleme; avand si o geometrie mai putin complicata, a fost construit utilizand elemente mai mari, dar care confera o acuratete satisfacatoare.
Prin renderizare, se obtine aspectul realist din ura 10, potrivit pentru studiul imagistic, in timp ce pentru analiza mecanica ramane mai utila imaginea din ura 6.1, care are o structura discretizata si se preteaza la analiza cu elemente finite.
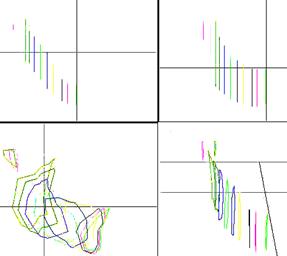
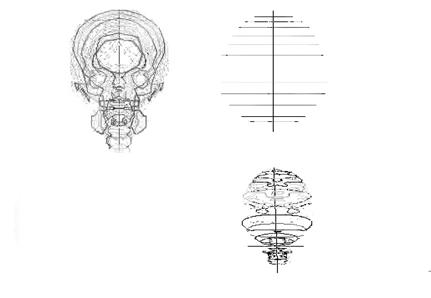
Pe baza acestor imagini construite, s-au putut realiza, cu programe specializate, sectiuni asemanatoare celor obtinute prin tomografie, cu deosebirea (in avantajul cercetarii) ca acestor sectiuni li se pot calcula: aria, perimetrul, centrul de greutate, momentele de inertie, etc.
Importate in orice program de grafica, aceste imagini ale sectiunilor pot fi manipulate in sensul suprapunerii, mixarii, deformarii, scalarii, etc., in vederea:
crearii unui intreg din partile componente;
studierii unei sectiuni sau unui grup de sectiuni.
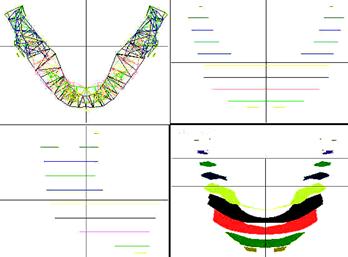
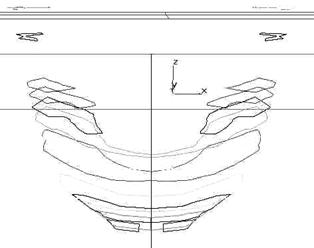
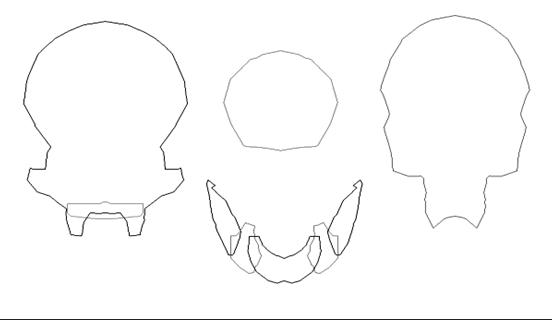
Pentru claritate, s-au translatat sectiunile din ura 6.4, rezultand asa-numitele desene explodate din ura 13, in doua vederi, prima fiind in , deci utilizabila pentru observarea exacta a geometriei si calculul dimensiunilor si ariilor.
|
|
|
|
|
|
|
Imagine explodata a sectiunilor prin mandibula |
Sectiuni in ul yOz prin mandibula |
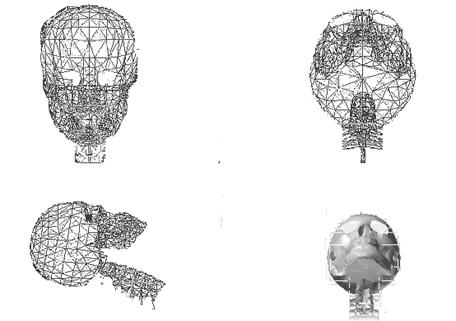
Vederile 3D ale modelului din ura 9
Sectiuni aferente urii 15
|
|
|
|
Detalieri ale urii 16 |
Detalieri ale urii 17 |
Fiecare dintre straturile obtinute prin sectionare poate fi studiat si masurat in parte, dupa cum arata ura 19.
|
|
|
Sectiuni extrase din ura 16 |
Algoritmi pentru prelucrarea imaginilor
Variabila T reprezinta pozitia cursorului in butonul tip potentiometru (track-bar), cu valori intre 0 si 255 din subsolul ferestrei programului.
** Functia de luminozitate
function Lum(C: Integer): Integer;
begin
if (C*T) shr 7 > 255
then Lum:=255
else Lum:=(C*T) shr 7; //impartire la 128 = 256/2
end;
** Functia de contrast (varianta I)
function Contr(C: Integer): Integer;
begin
if C > 127
then if (C+T-l27 <= 255) and (C+T-l27 >= 0)
then Contr:=C+T-l27
else if C+T-l27 > 255
then Contr:=255
else Contr:=0
else if (C-T+127 <= 255) and (C-T+127 >= 0)
then Contr:=C-T+127
else if C-T+127 > 255
then Contr:=255
else Contr:=0;
end; //contrastul se realizeaza in functie de un singur canal (R, G sau B)
** Rutina de contrast (varianta a II-a)
for x:=0 to Width-l
do if ReadLine^[3*x]*ReadLine^[3*x+1]*ReadLine^[3*x+2] shr 12 < 127
then for k:=0 to 2
do if (ReadLine^[3*x+k]*(255-T)) shr 7 > 255
then ReadLine^[3*x+k]:=255
else ReadLine^[3*x+k]:=(ReadLine[3*x+k]*(255-T)) shr 7
else for k:=0 to 2
do if (ReadLine^[3*x+k]*T) shr 7 > 255
then ReadLine^[3*x+k]:=255
else ReadLine^[3*x+k]:=(ReadLine^[3*x+k]*T) shr 7;
// contrastul se realizeaza in functie de culoarea pixel-ului (se tine cont de toate canalele R,G si B)
** Functie logaritmica
function Logarithmic(C: Integer): Integer;
var
R: Integer;
begin
if T > 0
then R:=Trunc(C*Ln(1+T/255*Exp(1)))
else R:=0;
if R > 255
then Logarithmic:=255
else Logarithmic:=R;
end;
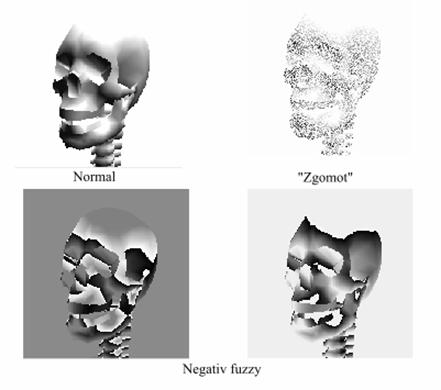
** Functie de zgomot
function Noise(C: Integer): Integer;
begin
if Random(256) < T
then Noise:=255 //se schimba culoarea pixel-ului in alb, aleator
else Noise:=C; //sau culoarea ramane neschimbata
end;
** Functie sinusoidala
function Sine(C: Integer): Integer;
var
R: Integer;
S: Real;
begin
S:=sin(sqrt(sqr(x/3-51)+sqr(y-51)));
R:=Trunc(C/10*(T/127*S+9));
if R > 255
then Sine:=255
else Sine:=R;
end;
** Functie de colorare
function Colorizer(C: Integer): Integer;
begin
if x mod 3 = Window.ItemColorize.Tag //Pad-ul din meniul Efecte de culori are o proprietate Tag
then if C+T-l27 <= 255 // in functie de care se selecteaza canalul modificat de potentiometru (R,G,B)
then if C+T-l27 >= 0
then Colorizer:=C+T-l27
else Colorizer:=0
else Colorizer:=255
else Colorizer:=C;
end;
** Functia de negativare
function Negativ(C: Integer): Integer;
begin
C:=255-C;
end;
for y:=0 to Height-l
do begin
for x:=0 to Width-l
do begin
MedianValue:=(ReadLine^[3*x]+ReadLine^[3*x+1]+ReadLine[3*x+2]) div 3;
ReadLine^[3*x]:=MedianValue;
ReadLine^[3*x+1]:=MedianValue;
ReadLine^[3*x+2]:=MedianValue;
end;
end;
** Rutina de tonuri de gri (greyscale)
for y:=0 to Height-l
do begin
ReadLine:=ScanLine[y];
for x:=0 to Width-l
do begin
MedianValue:=(ReadLine^[3*x]+ReadLine^[3*x+1]+ReadLine[3*x+2]) div 3;
ReadLine^[3*x]:=MedianValue;
ReadLine^[3*x+1]:=MedianValue;
ReadLine^[3*x+2]:=MedianValue;
end;
end;
// fiecare canal se completeaza cu media aritmetica a tuturor canalelor pixel-ului respectiv (R,G si B)
** Procedura de oglinda (mirror) - pe orizontala
procedure TWindow.ItemSubHorizontalClick(Sender: TObject);
var
ReadLine: PByteArray;
W: Integer;
procedure SwapCh(Ch1,Ch2: Word); //interschimba valorile a doua canale
var aux: Byte;
begin
aux:=ReadLine^[Ch1];
ReadLine^[Ch1]:=ReadLine^[Ch2];
ReadLine^[Ch2]:=aux;
end;
begin
with Image.Picture.Bitmap
do begin
W:=Width-l;
for y:=0 to Height-l
do begin
ReadLine:=ScanLine[y];
for x:=0 to W shr 1
do begin
SwapCh(3*x,3*(W-x));
SwapCh(3*x+1,3*(W-x)+1);
SwapCh(3*x+2,3*(W-x)+2);
// se interschimba coloana 1 cu coloana n, coloana 2 cu coloana n-l etc.
end;
end;
end;
end;
** Procedura de oglinda pe verticala
procedure TWindow.ItemSubVerticalClick(Sender: TObject);
var
P,Q,aux: PByteArray;
H: Integer;
begin
with Image.Picture.Bitmap
do begin
GetMem(aux, 3*Width);
H:=Height-l;
for y:=0 to H shr 1
do begin
P:=ScanLine[y];
Q:=ScanLine[H-y];
Move(P^, aux^, 3*Width);
Move(Q^, P^, 3*Width);
Move(aux^, Q^, 3*Width);
end;
FreeMem(aux, 3*Width);
end;
// se schimba randul 1 cu randul n, randul 2 cu randul n-l etc.
end;
** Procedura de marire
procedure TWindow.ItemZoomInClick(Sender: TObject);
var
ReadLine,PreReadLine,aux: PByteArray;
k: 0..2;
begin
with ImageAux.Picture.Bitmap
do begin
Height:=Image.Picture.Bitmap.Height shl 1;
Width:=Image.Picture.Bitmap.Width shl 1;
end; // creeaza o imagine noua cu dimensiuni duble celei initiale
// si fiecare pixel din imaginea initiala va aparea de doua ori succesiv in imaginea noua pe o linie
// si similar, de doua ori succesiv pe linia urmatoare
with Image.Picture.Bitmap
do for y:=0 to Height-l
do begin
ReadLine:=ScanLine[y];
PreReadLine:=ImageAux.Picture.Bitmap.ScanLine[y shl 1];
for x:=0 to Width-l
do for k:=0 to 2
do begin
PreReadLine^[6*x+k]:=ReadLine^[3*x+k];
PreReadLine^[6*x+3+k]:=ReadLine^[3*x+k];
end;
aux:=PreReadLine;
PreReadLine:=ImageAux.Picture.Bitmap.ScanLine[y shl 1+1];
Move(aux^, PreReadLine^, 6*Width);
end;
end;
** Procedura de micsorare
procedure TWindow.ItemZoomOutClick(Sender: TObject);
var
LineHi,LineLo,ReadLine: PByteArray;
ColIndex: Integer;
begin
with ImageAux.Picture.Bitmap
do begin
Height:=Image.Picture.Bitmap.Height shr 1;
Width:=Image.Picture.Bitmap.Width shr 1;
end; // se creeaza o imagine noua cu dimensiuni pe jumatate a celei initiale
// se face media aritmetica a patru pixeli dispusi sub forma unui patrat si se va trece o data in imaginea noua
with Image.Picture.Bitmap
do for y:=0 to (Height-l) shr 1
do begin
LineHi:=ScanLine[y shl 1];
LineLo:=ScanLine[y shl 1+1];
ReadLine:=ImageAux.Picture.Bitmap.ScanLine[y];
for x:=0 to (3*Width-l) shr 1
do begin
ColIndex:=x shl 1-x mod 3;
ReadLine^[x]:=(LineHi^[ColIndex]+LineHi^[ColIndex+3]+
LineLo^[ColIndex]+LineLo^[ColIndex+3]) shr 2;
end;
end;
end;
|
|
|||
|
Exemple ale aplicarii unor filtre ale programului |
** Functia de negativ de nivel
function Neg(C: Byte): Byte;
begin
if T > C
then Neg:=T-C
else Neg:=255-C+T;
// Negativarea se executa in functie de T = pozitia cursorului in TrackBar
end;
** Functie care genereaza umbre si surse de lumina
(Principiu de functionare: daca un canal (R,G,B) al unui pixel depaseste un prag dat de pozitia cursorului in TrackBar, atunci acel canal va deveni 0 sau 255, in functie de care e mai aproape valoarea sa)
function Shadow(C: Byte): Byte;
begin
if C > 255-T
then Shadow:=255
else if C < T
then Shadow:=0
else Shadow:=C;
end;
** Procedura de detectare a limitelor (contururilor) unui obiect
(Principiu de functionare: se a culoarea unui pixel cu cea a celui care il urmeaza pe orizontala si pe verticala si daca diferenta de culoare trece peste un prag dat de pozitia TrackBar-ului, se accentueaza culoarea respectivului pixel)
procedure TWindow.ItemDetectBoundsClick(Sender: TObject);
var
PHi,PLo, QHi,QLo: PByteArray;
k: Byte;
AddValue: Byte;
begin
with Image.Picture.Bitmap
do for y:=1 to Height-l
do begin
PHi:=ImageAux.Picture.Bitmap.ScanLine[y-l];
PLo:=ImageAux.Picture.Bitmap.ScanLine[y];
// se citesc doua randuri de pixeli
QHi:=ScanLine[y-l];
QLo:=ScanLine[y];
for x:=0 to Width-l
do begin
// Orizontal
if x > 0
then begin
AddValue:=0;
for k:=0 to 2
do AddValue:=Abs(PHi^[3*x+k]-PHi^[3*(x-l)+k]);
AddValue:=(AddValue div 3);
// modulul diferentei valorilor celor doi pixeli se calculeaza ca fiind media aritmetica a canalelor R,G, B ale pixel-ului
for k:=0 to 5
do begin
if QHi^[3*x+k-3]+AddValue > 255
then QHi^[3*x+k-3]:=255
else QHi^[3*x+k-3]:=QHi^[3*x+k-3]+AddValue;
// aceasta valoare (modului diferentei) se adauga la cei doi pixeli asezati unul dupa altul, accentuand culoarea acestora spre alb (255,255,255)
end;
end;
// Vertical
AddValue:=0;
for k:=0 to 2
do AddValue:=Abs(PHi^[3*x+k]-PLo^[3*x+k]);
AddValue:=(AddValue div 3);
// se calculeaza similar modului diferentei a doi pixeli asezati unul sub altul
for k:=0 to 2
do begin
if QHi^[3*x+k]+AddValue > 255
then QHi^[3*x+k]:=255
else QHi^[3*x+k]:=QHi^[3*x+k]+AddValue;
if QLo^[3*x+k]+AddValue > 255
then QLo^[3*x+k]:=255
else QLo^[3*x+k]:=QLo^[3*x+k]+AddValue;
// se adauga valoarea calculata la ambii pixeli
end;
end;
end;
end;
** Procedura de reliefare a conturului
// Similara procedurii anterioare, dar in acest caz, valoarea adaugata poate fi si negativa, deci culoarea unui pixel poate fi marita, dar si micsorata.
procedure TWindow.ItemEmbossBoundsClick(Sender: TObject);
** Procedura de incrementare a valorii unui pixel, tinand cont de faptul ca aceasta valoare trebuie sa se incadreze in intervalul 0255
procedure IncValue(aVal: Integer; var nVal: Byte);
begin
if nVal+aVal > 255
then nVal:=255
else if nVal+aVal < 0
then nVal:=0
else nVal:=nVal+aVal;
end;
var
PHi,PLo, QHi,QLo: PByteArray;
k: Byte;
AddValue: Integer;
begin
with Image.Picture.Bitmap
do for y:=1 to Height-l
do begin
PHi:=ImageAux.Picture.Bitmap.ScanLine[y-l];
PLo:=ImageAux.Picture.Bitmap.ScanLine[y];
// se citesc doua randuri de pixeli
QHi:=ScanLine[y-l];
QLo:=ScanLine[y];
for x:=0 to Width-l
do begin
// Orizontal
if x > 0
then begin
AddValue:=0;
for k:=0 to 2
do AddValue:=PHi^[3*(x-l)+k]-PHi^[3*x+k];
AddValue:=AddValue div 3;
// Valoarea de adaugat nu mai e reprezentata de modulul diferentei a doua culori de pixeli, ci de valoarea efectiva a acestei diferente de numere din intervalul 0255, diferenta care poate fi si negativa.
for k:=0 to 5
do IncValue(AddValue, QHi^[3*x+k-3]);
// Aceasta valoare se adauga la doi pixeli asezati succesiv unul dupa altul
end;
// Vertical
AddValue:=0;
for k:=0 to 2
do AddValue:=PHi^[3*x+k]-PLo^[3*x+k];
AddValue:=AddValue div 3;
for k:=0 to 2
do begin
IncValue(AddValue, QHi^[3*x+k]);
IncValue(AddValue, QLo^[3*x+k]);
// si la doi pixeli asezati unul sub altul.
end;
end;
end;
end;
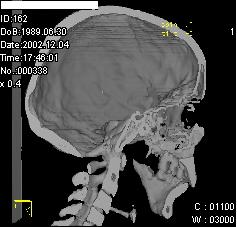
Imaginile subiectului bolnav (o fetita AP, 12 ani) au fost achizitionate la computerul tomograf SOMATOM Plus 4 din dotarea Bazei cu Utilizatori Multiplii Centrul de modelare a protezarii si interventiilor chirurgicale asupra scheletului uman CMPICSU, creata in Universitatea Politehnica din Timisoara. Aceste imagini au fost prelucrate reconstruindu-se 3D, cu software-ul VC10C propriu al tomografului, imaginea reala a scheletului cranian cu deficienta mandibulara congenitala (ura 21).
|
|
|
|
|
|
Pasii parcursi pentru reconstructia 3D sunt:
Scanarea normala a pacientului in modul spiral, cu slice-uri la distante mai mici de 2-3 mm, astfel ca necesitatea de aproximare a formelor sa fie cat mai redusa, dar nici pacientul sa nu fie prea expus.
Se selecteaza butonul Evaluation-3D imaging din meniu.
In fereastra astfel deschisa, se selecteaza butonul Images si succesiunea de imagini din care se va realiza reconstructia.
Se selecteaza apoi butonul SSD din aceeasi fereastra si se asteapta pana reconstrucia s-a terminat.
Dupa obtinerea imaginii 3D, aceasta poate fi rotita si privita in diverse persepctive utilizand doar butoanele mouse-ului.
Pentru selectarea altor intervale de densitate care trebuie reconstruite, se reia procedura prin acttionarea butonului Start. In imaginea 3D va aparea astfel noul interval de densitate.
Aria reconstruita poate fi prezentata in cadre patrate prin utilizarea butonului ROI-ON si prin selectarea cu mouse-ul a noii portiuni de imagine care va trebui sa apara pe ecran.
Imaginea reconstruita poate fi marita/micsorata utilizand butonul Maximum Scale (unde noua scala este precizata in procente %), urmat de Start; dupa aceasta etapa se reia procedura de la punctul 6.
|
|
|
|
Mandibula artificiala din Titan imtata prin interventie chirurgicala |
|
Dupa realizarea imaginii, s-a conceput imtul mandibular si s-a realizat din tabla de
Ti 99,99%. Prin interventie chirurgicala, aceast imt a fost atasat restului de mandibula existent in schelet In aceeasi interventie a fost prelevat material oso de la capul femueral al subiectului si s-a plasat pe imt. La doua sa[ptamani dupa interventie, asimetria faciala a pacientei a fost aproape integral corectata (ura 22).
Pe baza acestei experiente pozitive, s-a realizat proiectarea unei truse de imte faciale valabile pentru diferite tipuri de fracturi si a unui distractor osos.
Executia acestior obiective a fost realizata in cadrul Laboratorului de orteze, proteze si imte faciale si ortopedice din cadrul Facultatii de Mecanica a Universitatii Politehnica Timisoara.
a Ventilatia mecanica efectueaza ventilarea (eliminarea C02) si oxigenarea. Oxigenarea (administrarea de 02 pentru organism) depinde I pe lan [...] |
Se pot datora unor cauze cum sunt: stresul, alcoolul, regimul alimentar toxic, stresul combinat cu factorul psihic. Bolile cardiovasculare, precum hip [...] |
Comportarea mecanica a mandibulei 1. Aspecte generale Mandibula este osul nepereche care constituie maxilarul inferior al craniului si s [...] |
Copyright © 2010 - 2025
: eSanatos.com - Reproducerea, chiar si partiala, a materialelor de pe acest site este interzisa!
Informatiile medicale au scop informativ si educational. Ele nu pot inlocui consultul medicului si nici diagnosticul stabilit in urma investigatiilor si analizelor medicale la un medic specialist.
Termeni si conditii - Confidentialitatea datelor - Contact
Despre craniul |
| Alte sectiuni |
|
Ai o problema medicala? |